
Merhaba arkadaşlar . Geçenlerde bilgisayarımda bellek sıkıntısı çekmemin akabinde eski dosyalarımı silme kararı aldım. Bu dosyaları incelerken lisans ve yüksek lisans yıllarımda yaptığım bir çok projelerin sunumları, videoları ve bunlarla ilgili bir çok kaynak dosyalarıyla karşılaştım. Bu projeleri gün geçtikçe sizlerle paylaşacağım. Okuyacağınız bu yazı NAZA M-lite kontrol kartıyla bir S500 Quadcopter bir drone nasıl yapılır? , nasıl programlanır? Elektronik aksamların bir birleri ile iletişimi nasıl sağlanır? sorularının cevaplarını içermektedir. Bu yazı kısaca;
- Drone nedir?
- Drone’ların çalışma prensibi nedir?
- Drone’lar üzerindeki donanımlar ve çeşitleri nelerdir?
- Bir Drone nasıl yapılır?
- Drone’lar nasıl programlanır?
- Drone kullanırken iyileştirme nasıl yapılır?
- Deneysel çalışmalar.
gibi soruları ve bir çok deneyimlerimi içermektedir. Hazır mısınız? O zaman başlıyoruz.
PROJE ÖZETİ
Günümüzde quadcopter (drone) olarak adlandırılan insansız hava araçları (İHA) gerek askeri alanda, gerekse sivil alanda yaygın olarak kullanılmaktadır. Bu araçların çalışma sisteminin bilinmesi, uçuş sistemlerinin tanınması, sıfırdan yapılan tasarımlar için gerekli olduğu kadar, mevcut sistemlerin bir kaza sonrasında oluşan hasarlarının onarımında da büyük öneme haizdir. Bu çalışmada 4 pervaneli bir quadcopterin tasarım, üretim ve programlamasına ait tüm detaylar verilerek, kişisel olarak bir quadcopterin nasıl tasarlanıp geliştirileceği anlatılmıştır.
Çalışmada geliştirilen quadcopter havada uçarken üzerinde bağlı bulunan mini kameradan aldığı görüntüyü 7″ lik ekrana anlık olarak aktarım yapmaktadır. Üzerindeki GPS sisteminden okumuş olduğu konum bilgilerini, sensörlerden almış olduğu yükseklik ve basınç bilgilerini de göndererek konum takibi ve uçuş güvenlik imkanını da sağlamaktadır.
Bu arada yaptığım projenin 2016 yılındaki videosunda sizlerle paylaşıyorum. Bu yazı videodaki drone’nun en baştan sonuna kadar yapılışını anlatmaktadır. Bir Drone Nasıl Yapılır? sorusunu sonuna kadar cevaplayacağına eminim.
GİRİŞ
Bir çok insan, hayatının büyük bir bölümünü geniş alanlarda rutin işler yaparak geçirmektedir. Örneğin bir güvenlik görevlisi çalıştığı kurumun çevresinde gece gündüz defalarca kontroller gerçekleştirmek durumundadır. Yine aynı şekilde bir kargo görevlisi defalarca yol giderek kargolarını teslim etmektedir. Günlük hayatta buna benzer çok sayıda iş bulunmakta ve bu işlerin yapılması insanlar için büyük zahmetler oluşturmaktadır.
Benzer şekilde rutin olarak yapılan işlerin dışında anlık olarak da bazı görevlerin yapılması gerekebilmektedir. Örneğin bir yangın esnasında binaya girilmesi ya da havadan belli koordinatların fotoğrafının çekilmesi gibi işleri, insanların yapması bazen tehlikeli ya da imkansız olabilmektedir. Bunun gibi hem rutin işlerde hem de insanların yapmasının tehlikeli olduğu birçok görevlerde dronelerin kullanılması mümkün olabilmektedir.
Bu çalışmada geliştirilen sistem, günlük yaşamda buna benzer işlerde yada teknolojinin kullanılmaya başlandığı farklı yeni alanlarda da kullanılabilir. Drone Nasıl Yapılır? sorusunun cevabı olarak yapılan quadcopter belli düzeyde yük taşıma, kısa sürede belli mesafelere hızlıca ulaşma ve almış olduğu görüntüleri anlık olarak kişiye aktarmanın olduğu çeşitli görevlerde kullanılabilir.
DRONE’LARIN ÇALIŞMA PRENSİBİ
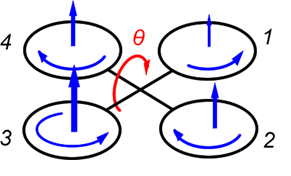
Dört rotorlu dikey kalkış yapabilen hava araçlarına genellikle quadcopter adı verilir. Bu araçlar yüksek manevra kabiliyetine sahiptir. Hareket için rotorlardan elde edilen itme kuvvetleri kullanılmaktadır. Birbirine dik iki şaft üzerine yerleştirilmiş dört rotor bulunmaktadır. Rotorlar elektrik motorları aracılığı ile döndürülmektedir. Quadcopter yeryüzü doğrusal eksenlerinde 3 boyutta (x,y,z) hareket edebilmektedir. Bu hareketini yeryüzü koordinat düzlemine göre 3 eksendeki açılarını değiştirerek (θ, Φ, ψ) gerçekleştirmektedir. 2 pervane saat yönüne doğru, 2 pervane ise saat yönünün tersi yönde dönerek oluşan torku dengelemektedir (Şekil 1). Quadcopterlerin yapabildiği 4 temel hareket vardır. Bunlar:
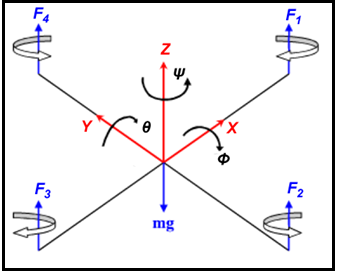
Şekil 1. Quadcopter üzerindeki rotor eksenleri ve dönüş açıları.
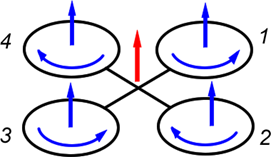
Dikey Hareket: Bu hareket için bütün motorların aynı hızda dönmesi gerekmektedir. Motorların hızları artırılıp, kendi ağırlığını yenecek seviyede kuvvete erişince yükselme, oluşan kuvvet kendi ağırlığına eşitse havada askıda kalma, düşükse irtifa kaybı gerçekleşir (Şekil 2.a).
Yalpalama Hareketi: Bu hareketi elde etmek için 2. ve 4. motorların hızları arasında bir fark yaratmak gerekir. Bu hız farkı motorların kaldırma kuvvetleri arasında farka neden olacaktır ve hızlı dönen rotorun tarafı yukarı yükselerek yana yalpalama hareketi gerçekleşecektir (Şekil 2.b).
Yunuslama Hareketi: Bu hareketi elde etmek için 1. ve 3. rotorların hızları arasında bir fark oluşturmak gerekir. Bu hız farkı sonucu hızlı dönen rotorun tarafı yukarı doğru yükselerek, öne yada geriye doğru yatma gerçekleşecektir (Şekil 2.c).
Sapma Hareketi: Sapma hareketinde araç dikey Z ekseni etrafında döner. Bu hareketi elde etmek için 1. ve 3. rotorların toplam hızları ile 2. ve 4. rotorların toplam hızları arasında bir fark oluşturulmalıdır. Bu rotor çiftleri birbirine zıt yönlerde döndükleri için, aracı zıt yönde döndürmeye çalışan torklar üretmektedirler. Bu torklar birbirine eşitse araç Z ekseni etrafında dönmez. Eğer rotorların ürettikleri torklar T1, T2, T3 ve T4 olarak adlandırılırsa: T1+T2–(T3+T4)≠0 olduğu sürece araç Z ekseni etrafında dönecektir (Şekil 2.d).
 a) Yükselme | 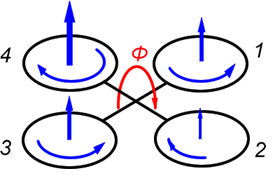 b) Yalpalama |
 c) Yunuslama | 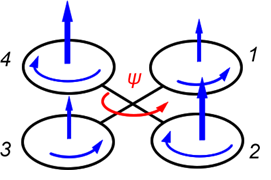 d) Sapma |
Şekil 2. Quadrotor üzerindeki rotorların dönüş hızlarına bağlı olarak yapmış olduğu hareketler.
MALZEMELERİN TANITIMI
Quadcopteri yapmak için gerekli malzemelerin tamamı İnternetden temin edilebilmektedir. Çoğu parça yurt dışı bazlı firmalarda bulunmaktadır. Bu konuda gerekli olan malzemeler ve özellikleri aşağıda verilmiştir.
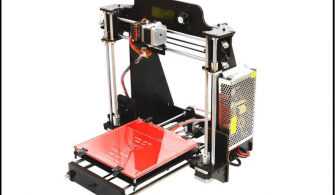
a) Şasi (frame)
Tüm ekipmanları üzerinde taşıyacak olan şasedir. Motordan motora olan boyutu Quadcopterin boyutunu belirler. Bu çalışma için belirlenen boyutlar 500 mm dir. Ağırlığı 416g dır. Kullanılan şasi S500 PCP Frame Kit adında uç kısımlar arası 500 mm olan bir elemandır. Bu arada kendi frame’inizi her hangi bir çizim programıyla tasarlayıp 3D printerdan çıkartabilirsiniz.Bu arada ilerleyen süreçlerde 3d printer projemi buradan tıklayıp bakabilirsiniz.. (Şekil 3.a).
b) Motor
Quadcopterin hareketi 4 kola bağlı olan motorlar aracılığı ile sağlanmaktadır. Motor olarak en iyi seçenek fırçasız doğru akım motorlarıdır. Amaca bağlı olarak kullanabilecek farklı motor türleri mevcuttur. Motorların seçiminde önemli nokta KV değeridir. Yapılacak çalışmaya göre motor seçilmelidir. KV değeri motora verilecek olan 1V karşılığında devri ifade eder. Yani motorun KV değeri 580 ve pilden gelen volt değeri 16,8 volt ise bu durumda boşta pervanesiz olarak devri 580×16,8=9744 rpm olacaktır. Bu çalışmada ağırlık taşıma, yüksek uçuş ve mükemmel verimlilik için SunnySky 580KV motor kullanılmıştır (Şekil 3.b).
580KV motorla kaldırabilecek kg değeri ise şu şekilde hesaplanır. Her bir motor 580KV üretir ve teorikte bu motorların tanesin 1.400 gram yük taşır.Toplam 4 motor var ve bu değer 5.600 gram olarak hesaplanır. Burada unutulmaması gereken motorların kaldırabileceği maksimum yük quadcoptere konulduğunda motorlar bu yükü kaldırmakta zorlanacak ve verim düşecektir. Önerilen ise bu değerin yarısının uygulanmasıdır yani 2.800 gramdır. Motorlarımızın çektiği akım ise; 580KV/16,8Volt=34,523Amper. 34,523Amper/4 (toplam motor sayısı)=8,630 amperdir. Bu değer motor başına çektiği akım değeri olmuş olur. Bu değer ne kadar küçük olursa uçuş süresi o kadar artacaktır.
Motor için uygun pervane seçildikten sonra motorun ilgili tabloları incelenerek ne kadar güç çekeceği, itme kuvveti, verim gibi bir çok özellik önceden görülebilir. Örneğin bu motor için ilgili tablolar incelenecek olursa APC12x3.8 pervane kullanıldığında (inc olarak boyu x derece olarak hatve açısı) %75 yükleme ile çekilen akım 8.3A, Çekme kuvveti 1020 grf, devri 6870 rpm/min, çekilen güç 122.84 W olur.
c) Elektronik hız kontrolcüsü (Elektronik Speed Control-ESC)
Motorlar direk olarak pile bağlandığında yanar. Bunu engellemek için elektronik hız kontrolcüsü kullanılır. Aynı zamanda motorların hızını da ayarlamak için kullanılır. Tipi motorların amper değerine ve bağlandıkları uçuş kontrol ünitelerinin enerji ihtiyacına göre belirlenmelidirler. Lipo (pil) alırken kontrol ünitesini destekleyip desteklemediğine bakılmalıdır. Bu projede kullanılan motorlar 0-14.1 arası amper çekmektedir. Kullanılan ZTW Spider Serisi ESC ler, 30A kadar akımı ve 2 – 6 adet arası LiPo pili desteklemektedir (Şekil 3.c). 600Hz frekansında çalışmaktadır.
d) Uçuş kontrol ünitesi (Kontrol kartı)
Uçuş karakteristiklerine ve yapılacak uygulamalara göre belirlenmesi gereken önemli bir parçadır. Bu çalışmada konum bilgisi için GPS desteği, havada dönüş yönünü göndermesi için pusula sistemi, yükseklik bilgisi için barometre sistemi gibi özellikler istendiği için bu özellikleri sağlayacak DJI NAZA-M Lite kontrol kartı seçilmiştir (Şekil 3.d).
e) Li-PO (Pil)
Lityum temelli bu piller patlama riskine karşı tehlikeli olmalarına rağmen vermiş oldukları yüksek amper onları vazgeçilmez kılmaktadır. Lipo piller hücrelerden oluşur. Herbir hücrenin minimum voltajı 3,7 volt maksimum voltajı ise 4,2 volttur. Seri bağlı hücreler S harfi ile gösterilir. Bu durumda S harfinden önceki rakam hücre sayısını gösterir. Yani 4S denildiğinde 4 tane hücre seri olarak bağlanmış olacaktır ve minimum 3,7×4=14,8 volt, maksimum 4,2×4=16,8 volt değerinde gerilim verecektir. Pillerin kapasiteleri C değeri ile gösterilmektedir. Bu çalışmada Turnigy 5000mAh 4S 20C LiPo pil kullanılmıştır (Şekil 3.e).
Her bir motor maksimum 14,1A akım çekmektedir. 4 motor bulunduğundan 4×14,1= 56,4A akıma ihtiyaç vardır. Kullanılan pil 5000mAh x 20C = 100 amper akım verebilmektedir. Buna bağlı olarak teorik uçuş süresi; 5000mAh = 5Ah eşittir. Throttle %50 deyken quadcopterimiz kalkışa başlar ve kalkışa başladığında motorların tanesi 2.5 amper akım çeker. Dört motor olduğundan motorlar anlık 10 amper akım çekmiş olur. Uçuş süremiz ise pil değeri/toplam akım değeridir. Yani 5Ah/10A=0.5 devir/saniyedir. Bu değeri devir/dakika cinsinden yazarsak 0.5×60= 30 devir/dakika uçar. Bu değer quadcopterin 30 dakika uçacağı anlamına gelir.
f) Pervane
Uçuş tarzınıza (Yük kaldırma, hızlı gitme, keskin dönüş, uzun süreli uçuş vb.) ve motorun özelliklerine göre pervane boyutunu ve hatve açısını belirlemek gerekir. Bu çalışmada HobbyKing Slowfly 12×4. 5 (CW/CCW) pervane kullanılmıştır (Şekil 3.f). 12 rakamı inc cinsinden boyunu, 3.8 ise derece cinsinden hatve açısını vermektedir. Quadcoptere takılan pervanelerin 2 tanesi saat yönüne doğru, 2 tanesi ise saat yönünün tersi yönde dönmelidir (Şekil 1.f) ve pervanelerde buna göre üretilirler.
g) Kumanda
Quadcopterimizin hareketini kontrol etmek için gerekmektedir. Yapılacak projeye göre kumanda seçilmelidir. 4 tane kanal Quadcopterin hareketleri için gerekmektedir. Bunlar Aileron(sağ, sol), Elevator (ileri, geri) Throhttle (gaz) ve Rudder (eksen, kuyruk dönüşü) hareketleridir. Diğer kanalları ise yapılacak ekstra işler için kullanılır.Mesela quadcopterde kullanılan kamerada gimbıl (hareketli kamera) var ise gimbılı sağa, sola, yukarı ve aşağıya döndürmek için iki servo motor kullanılır. Her servo motoru bir kanala bağlayarak istenilen hareket gerçekleştirilir. Kanalların diğer kullanım alanı ise yazılımsal kontroller olabilir.
Örneğin quadcopterlerde mod değiştirilmek istenirse (manuel, atti, GPS gibi) bunların geçişini sağlamak için bir kanal kullanılabilir veya quadcoptere herhangi bir mekanizma veya sistem kurulacaksa bunların hareketi kanallar sayesinde gerçekleştirilebilir. Çalışmada kullanılan kumanda Walkera DEVO 7 2,4Ghz 7 kanallı bir kontrol cihazıdır (Şekil 3.g). 4 kanal quadcopter hareketi için, bir kanal mod değiştirmek için ve bir kanalda gain ayarı yapmak için (uçuş sırasında titreşimi düşürmek), son kanal ise quadcopterde kullanılacak mekanizma için ayrılmıştır.
h) Kumanda Alıcısı (DEVO)
Quadcoptere takılan, kumandadan gönderilen komutları algılayıp Naza M Lite kontrolcümüze aktaran cihazdır. Uçuş mesafesi ne kadar fazla ise alınacak alıcının özelliği ise o kadar iyi olmalıdır. Çalışmada Walkera DEVO RX701 2.4GHz alıcı cihaz kullanılmıştır (Şekil 3.h). Alıcının özelliği 2 km mesafeden sinyal alabilmesidir.
i) Buzzer
Pilin voltajı azaldığında alarm veren cihazdır. Çalışmada Tester 1S-8S Buzzer kullanılmıştır (Şekil 3.i). Üzerindeki buton sayesinde pilin voltajının hangi değere düştüğünde sesli uyarı vermesi gerekiyorsa ona göre ayarlanır. Bu değer 4S pillerde 4.00 olarak ayarlanmalıdır aksi taktirde pilin ömrünü kısaltır.
j) Connector ve Pil Kablosu
Parçalar farklı yerlerden satın alınabildiği için bazı kablo bağlantıları dişi erkek olması gerekirken dişi dişi olarak bağlantıları denk gelebilir. Bunu önlemek için gerekli aparatlar vardır. Örneğin Walkera 450 Battery Head Adapter ve XT60 Male Female Bullet (Şekil 3.j) kullanılarak bu sorunlar önlenebilir. Projede kullanılan pillerin güç kablosu dişi olarak geldiği için ve bu kablo direk olarak quadcopterin güç kablosuna takılamamıştır, bunun için pillerin dişi konnektörü kesilip yerine erkek konnektör lehimlenmiştir.
k) Kamera
Uçuş sırasında görüntüyü çekmek için kullanılır. Kamera görüntüyü kamera vericisine, kamera vericisi kamera alıcısına, kamera alıcısı ise ekrana görüntüyü aktarır. Çalışmada 26*26 mm 1/3 CMOS 700TVL Mini WDR Kamera modeli kullanılmıştır (Şekil 3.k).
l) Ekran
Uçuş esnasında aktarılan görüntünün izleneceği ekrandır. Projede kullanılan ekran Eachine 40CH Raceband 5.8G 7 inc kendinden alıcılı bir ekrandır (Şekil 3.l). Kamera görüntüyü yine aynı araç üzerindeki vericiye, verici ise kişi tarafındaki alıcıya gönderir. Alıcı ise görüntüyü işledikten sonra ekrana verir.
m) Kamera Vericisi
Kameranın çektiği görüntüyü uzak mesafedeki alıcıya aktarmayı sağlar. Vericinin kaliteli olması görüntü kaybı için önemlidir. Kullanılan verici modülü Eachine TS835 FPV 5.8G 600MW 32CH 7-28V Wireless AV modelidir (Şekil 3.m).
n) Alıcı Mantar Anten
Ekranın üzerindeki hazır antenler ve kamera vericisindeki anten verimsiz çalışabilmektedir. Bu nedenle mantar anten kullanılması iyi bir çözüm olmaktadır (Şekil 3.n). Bu antenlerin çok fazla bağlantı şekli olduğundan ekranla uyumlu olmasına dikkat etmek gerekir. Antenlerden TX yazan vericilere RX yazanda alıcılara takılmalıdır. Projede TX yazan anten kamera vericisine, RX yazan anten ise ekrana takılmıştır.
o) GPS Modülü
GPS modülü quadcopterin nerede olduğunu konum olarak veren cihazdır. GPS modülü sayesinde her hangi bir iletişim sorunu olduğunda quadcopterin otonom olarak yere indirilmesi veya ilk kalkış konumuna geri gelebilmesi mümkün olmaktadır. Çalışmada Ublox M8NGPS modeli kullanılmıştır (Şekil 3.o).
p) Naza LED aparatı
Bu aparat, Nazanın içine program atmak için kullanılır. Naza kontrol kartının LED bölmesine takılmaktadır. Nazayı bilgisayara bağlayan kablo ilk önce LED aparatına takılır ve böylece bilgisayarla iletişimi sağlanmış olur. LED aparatının üzerinde ışıklandırma sistemi vardır. Bu ışıklandırma sistemde herhangi bir hata varsa (programsal veya donanımsal) aralıksız kırmızı ışık verir ve sistem hangi modda çalışacak ise o ışıklandırmayı bize gösterir. Eğer sistem manuel modunda uçuş yapacaksa ard arda üç kırmızı ışık hızlı hızlı yanıp bir saniye bekler ve bu süreç devam eder.
Sistem atti modunda uçuş yapacaksa ard arda iki kırmızı ve bir sarı ışık hızlı hızlı yanıp bir saniye bekler ve süreç devam eder. Son olarak sistem GPS modunda çalışacaksa ard ard iki kırmızı ışık ve bir yeşil ışık hızlı hızlı yanıp bir saniye bekler ve süreç devam eder. Sadece uçuş sırasında GPS modunda ise bir süre sonra yeşil ışık yanıp sönmeye başlar. Çalışmada DJI Naza-M lite LED model kullanılmıştır (Şekil 3.p).
r) UBEC (Ultimate Battery Eliminating Circuit)
Pilden gelen gerilimi direk olarak kontrol kartına veremeyiz. Aksi taktirde kontrol kartı yanar. UBEC ler LiPo pilden aldığı 14.1V gerilimi 5V da çevirerek uçuş kontrol sistemini besler. Çalışmada DJI Naza-M lite PMU modeli kullanılmıştır (Şekil 3.r).
s) OSD (On Screen Display)
Uçuş sırasında yükseklik, basınç, uçuş yönü, uçuş ekseni, pil yüzdesi, uçuş süresi ve kaç derecelik açıyla ilerlediği gibi bilgileri veren ve uçuş ekranında gösteren, uçuşun güvenliği artıran karttır. Çalışmada FPV flight Controler N1 OSD modeli kullanılmıştır.Videoda ekranda görülen uçuş bilgilerini OSD sayasinde ölçmekteyiz.Uçuş bilgilerini yazımın başında paylaştığım videonun 1.10’uncu dakikasında net olarak görebilirsiniz. (Şekil 3.s).
t)Işıklandırma
Uçuş sırasında quadcopterin ön ve arka tarafı sıkça karıştırılır ve kaza yapma riski artar. Bunu önlemek için genellikle ön kısımda kırmızı, arka kısımda mavi ışıklandırma kullanılır(Şekil 3.t).
 a) Şasi (frame) (1 adet) |  b) SunnySky 580KV motor (4 adet) |  c) ZTW Spider Serisi ESC (4 adet) |  d) DJI NAZA-M Lite kontrol kartı(1 adet) |
 e) Turnigy 5000mAh 4S 20C LiPo pil (2 adet) | 
f) HobbyKing Slowfly 12×4.5 (CW/CCW) pervane(1 takım) |  g) Walkera DEVO 7 2,4Ghz, 7 kanallı kumanda(1 adet) |
h) Walkera DEVO RX701 2.4GHz kumanda alıcısı (1 adet) |
 i) Tester 1S-8S Buzzer(2 adet) |
j) Walkera 450 Battery Head Adapter kablosu (2 takım) | 
k) 26*26 mm 1/3 CMOS 700TVL Mini WDR Kamera(1 adet) |  l) Eachine 40CH Raceband 5.8G 7 inc Ekran(1 adet) |
|
m) Eachine TS835 FPV 5.8G 600MW 32CH 7-28V kamera verici modül(1 adet) |  n) Alıcı Mantar Anten (2 takım) |  o) Ublox M8NGPS GPS modülü(1 adet) |  p) DJI Naza-M lite LED bağlantı cihazı(1 adet) |
|
r) DJI Naza-M lite PMU besleme aparatı, (1 adet) |
e) FPV flight Controler N1 OSD modeli uçuş kontrol kartı(1 adet) | 
t) Let ışıklar (1 takım) |





Şekil 3. Quadcopterin montajını oluşturan parçalar.
DONANIMIN KURULMASI
Motor, ESC, Pil, Buzzer, Kontrol Kartı Bağlantısı
Parvaneler motorlara monte edildikten sonra motorlar da ESC’ye bağlanır. Burada dikkat edilmesi gereken nokta sol ön motor ve çaprazındaki arka sağ motor saat yönüne doğru dönerken, diğer iki motor saat yönünün tersine doğru dönmelidir. Bunun içinde saat yönüne doğru dönecek olan motorların siyah ve mavi kablolarını ESC ye ters bağlanarak istenen dönüş yönü elde edilmiş olur. ESC’lerden gelen kablolar ise Naza kontrol kartının M1, M2, M3, M4 bağlanmalıdır (Şekil 4).
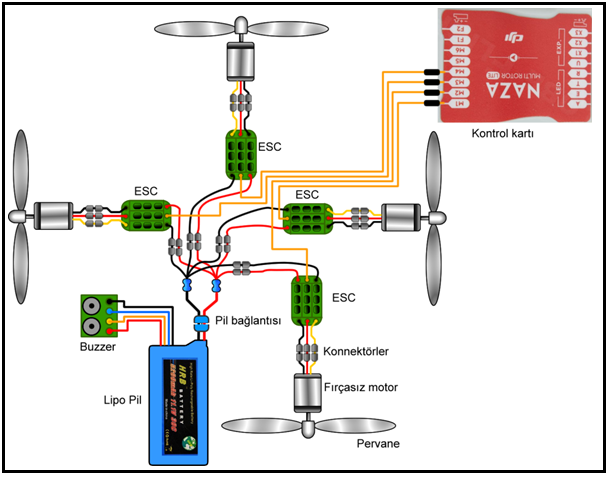
Şekil 4. Motorlar, ESC, Pil, Buzzer, Kontrol Kartı Bağlantıları
GPS, OSD, Kamera, Pil, Kamera Vericisi Kontrol Kartı Bağlantıları
Kamerayı OSD’nin IVG girişine bağlandıktan sonra, kamera vericisini de OSD’nin OVG girişine bağlanır. OSD kameradan alınan görüntüleri kendi içerisinde işleyip kamera verisine aktarır ve uzak mesafedeki kamera alıcısına böylece görüntü iletilmiş olur. kendi içinde görüntü işleme yapar ve bilgileri kamera alıcısına, kamera vericisi aracılığıyla aktarır. Pilden gelen pozitif kutup OSD’nin VCC girişine, negatif kutup ise GND girişine bağlanır. GPS modülü ise OSD’nin GPS girişine bağlanır. OSD ile Naza kontrol kartı EXP girişi ile haberleşir (Şekil 5).
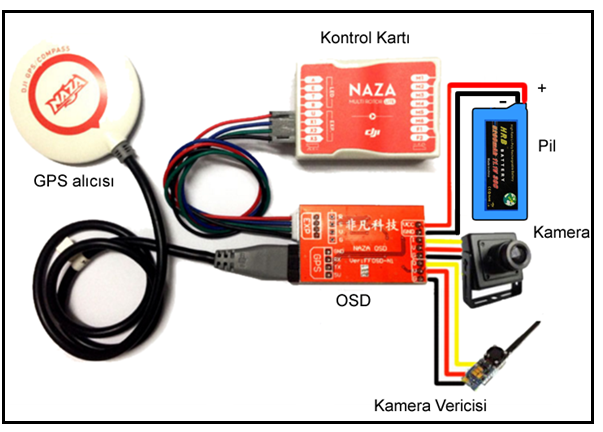
Şekil 5. GPS, OSD, Kamera, Pil, Kamera Vericisi ve Kontrol Kartı Bağlantıları
NAZA LED, Ubec, Kumanda Alıcısı Kontol Kartı Bağlantısı
Burda en önemli bağlantı Devo bağlantısıdır. Bu kısımda yapılacak yanlış bir bağlantı kumandada ileri yerine geri gitme, sağ yerine sola gitme gibi hatalara neden olur. Kumanda alıcısındaki sırasıyla ELEV(Elevator), AILE(Elevator), THRO(Trohttle), RUDD(Rudder), GEAR(Mod seçme), AUX1(kanal1), AUX2(kanal2), kısımlarını NAZA kartında sırasıyla E(Elevator), A(Aileron), T(Trohttle), R(Rudder), U(Mod seçme), X1(kanal1), X2(kanal2), kısmına bağlanmalıdır. Kumanda 7 kanallı olduğundan X3 kanalına herhangi bir bağlantıya gerek yoktur. Naza LED cihazı Naza’nın LED kısmına, UBEC’i ise Naza kartındaki pil şekli olan bölmeye yerleştirilmelidir (Şekil 6).
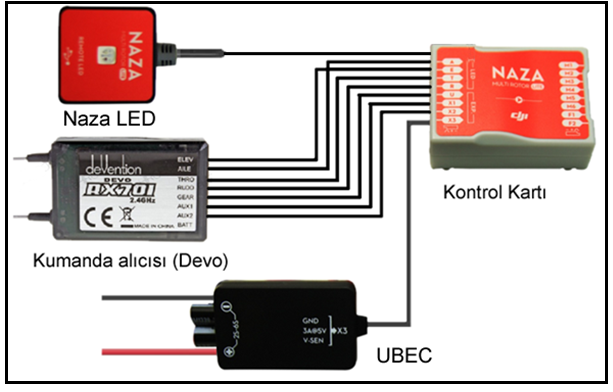
Şekil 6. Naza Led, Ubec, Kumanda Alıcısı Kontol Kartı Bağlantısı.
Bütün bu bağlantıların quadcopter üzerindeki görünümleri Şekil 7’de verilmiştir.

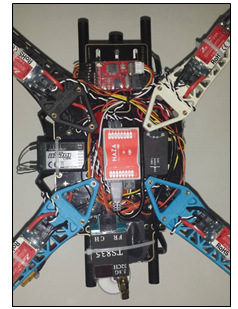
Şekil 7. Quadcopterin devre bağlantılarının görünümü.
KONTROL PROGRAMI ARAYÜZ AYARLARI
Projede DJI NAZA kontrol kartı kullanıldığı için firmanın sitesinden (http://www.dji.com) DJI NAZA Lite Assistant programı ve DJI Naza Sürücüsü indirilip bilgisayara kurulur. Naza USB kablosu bilgisayara ve LED modülüne bağlanarak devamında aşağıdaki işlemler yapılır.
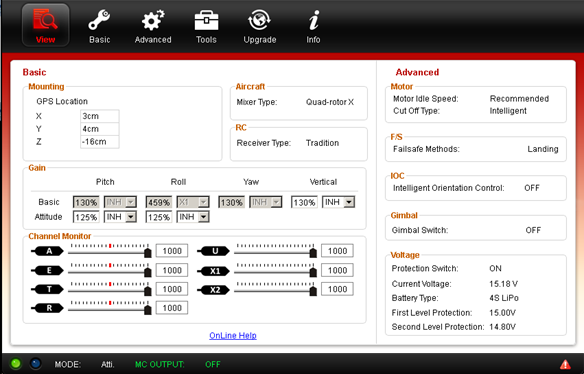
View Menüsü
Program kurulduktan sonra karşımıza gelen menüdür. Bu menüde diğer menülerde yapılan işlemlerin ve seçimlerin kısa kısa bilgileri gösterilir. Programın quadcoptere bağlandığı sol alttaki mavi ışığın yanıp sönmesiyle anlaşılır. Şekil 8.a’ da projedeki programsal seçimler gösterilmiştir.
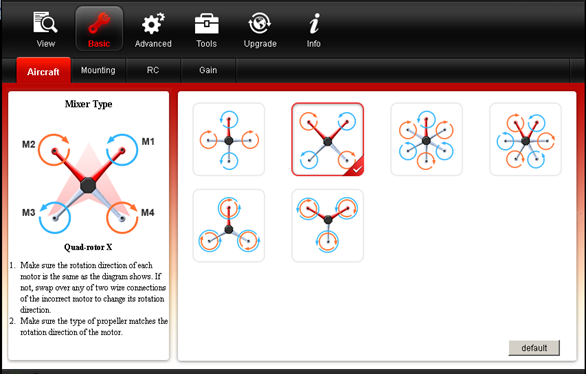
Basic-Aircraft Menüsü
Bu menü, tasarlanan drone tipinin tespit edildiği bölümdür. Kullanılan motor sayısına bağlı olarak ilgili model tipi seçilmelidir. 4 motorlu iki seçenek vardır. Uçuş tipine göre hangisi tercih ediliyorsa o tip seçilmelidir. Projede 2 motor önde 2 motor arkada olan model, yani X modeli seçilmiştir (Şekil 8.b).
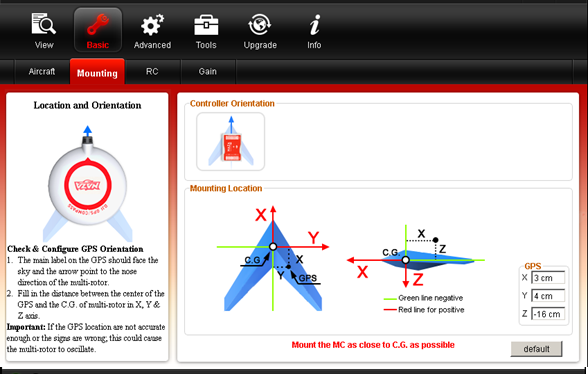
Basic-Mounting Menüsü
Mounting menüsü GPS modülünün multikopter üzerindeki konumunun girileceği bölümdür. GPS modülünün konumunu tam olarak girmemiz uçuş güvenliği için gereklidir. Olası bir durumda örneğin kumanda sinyali kesilirse GPS sistemi, quadcopteri yere otomatik olarak indirmektedir. Yanlış girilen değerlerde quadcopter yere tam inmeden motorlardan gücü kesip kazaların oluşmasına neden olabilir (Şekil 8.c).
Basic-X,Y,Z değerleri
X değeri GPS modülünün quadcopterin önüne olan mesafedir. Eğer merkez noktasından ileride ise bu değer pozitif olarak girilmelidir. Eğer merkez noktasının gerisinde ise 3 ve 4 numaralı motorlara yakın ise bu değer negatif şekilde girilmelidir.
Y değeri GPS modülünün quadcopterin y eksenindeki konumunu belirleyen değeridir. Quadcopterin burnu ileri doğru bakarken tam arkasına geçildiğinde GPS modülü merkezden sağa doğru konumlandırılmış ise pozitif değer, merkezden sola doğru konumlandırılmış ise negatif değer girilmelidir.
Z değeri, GPS modülünün quadcopterin ağırlık merkezine olan uzaklığıdır. Naza’nın yerleştirildiği yüzey baz alınarak hesaplanmalıdır. Merkezden yukarıda yer alıyorsa bu değer negatif olarak girilmelidir. GPS hassas bir sensördür ve elektromanyetik dalgalardan uzakta olmalıdır. Bu sebeple GPS’in yanında bir yükseltme çubuğu gönderilir. Bu çubuğu veya daha uzun bir çubuk kullanarak GPS sensörü yerleştirilmelidir. Merkezden aşağıda kalmasını veya merkeze yakın olmasını önerilmez.
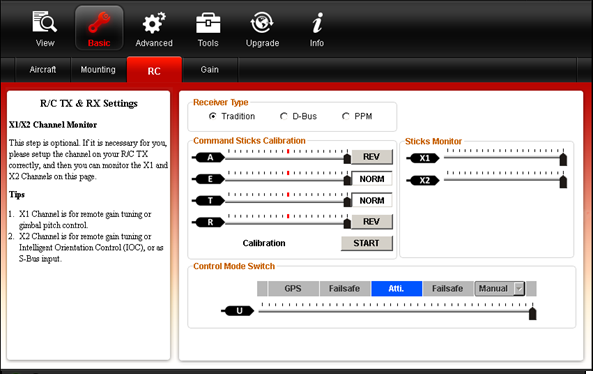
Basic-RC Menüsü
Bu menü kullanılan kumanda alıcısının modelinin quadcoptere tanıtıldığı, çeşitli kumanda kombinasyonlarının yapıldığı, kumandanın nazaya tanıtıldığı, kumanda kanallarının ayarlandığı ve uçuş modlarının (manuel, atti, GPS) belirlendiği, kumanda-Naza ilişkisinin yapıldığı bölümdür (Şekil 8.d).
Receiver Type ile ilgili olarak üç seçenek sunulur; Tradition: Alıcı türünün girildiği bölümdür. Eğer Aileron, Rudder, Trohttle ve Elevator kanallarını ayrı ayrı Naza’ya bağladıysa ‘Tradition’ şıkkı işaretlenmelidir. Projede bu seçenek işaretlenmiştir. D-Bus: Bazı alıcılar bütün kanalları tek bir kablodan gönderen D-bus iletişim protokolunü kullanır. Bu alıcılarda tek bir kablo ile bağlantı yapmak için D-bus çıkışı Naza üzerinde X2 ye bağlanmalıdır ve yazılımdan D-bus seçeneği işaretlenmelidir. PPM: Bu seçenek tek bir sinyal çıkışı ile tüm kanalların sinyalini almak için kullanılır.Command Sticks Calibration: Bu menüde kumandanın sticklerini sıfırlama ve tanıtma işlemi yapılır. Start butonuna tıklandıktan sonra kumandanın stikleri tek tek hareket ettirilmelidir. Burada yazılım stiklerin limitlerini kaydedecektir. Bütün stikleri son noktalara kadar birkaç kere hareket ettirilmeli ve ayarlardan emin olduktan sonra ‘finish’ butonuna basılmalıdır. Eğer kumandadan gaz verdiğimizde programda gaz azaltıyorsa, yandaki butonlardan Norm (normal) seçeneği Rev (tersi) yapılmalıdır. Bu durum diğer hareketler için de geçerlidir.
Sticks Monitor
İki kanalın kumanda da yerlerinin ayarlandığı bölümdür. Kumada da hangi butonlar daha rahat kullanılırsa o butonlar aktif edilmelidir. Yapılan projede X1 kanalı gain ayarını azaltıp artırmaya, X2 ise araç üzerine herhangi bir amaç için takılabilecek bir servo motor kullanımı için atanmıştır.
Control Mode Switch
Kumandanın üçlü switchlerinden birinin atanması gerektiği bölümdür. Üçlü switch hareket ettirildiğinde modların değiştirilmesi sağlanmalıdır. Projede üçlü switch kanalı üç mod ayarlamak için kullanılmıştır. Bunlar manuel mod, atti modu ve GPS modudur. Fotografın çekildiği esnada kumandada Atti mod açık olduğundan program arayüzünde Atti mod aktif gözükmektedir (Şekil 8.d).
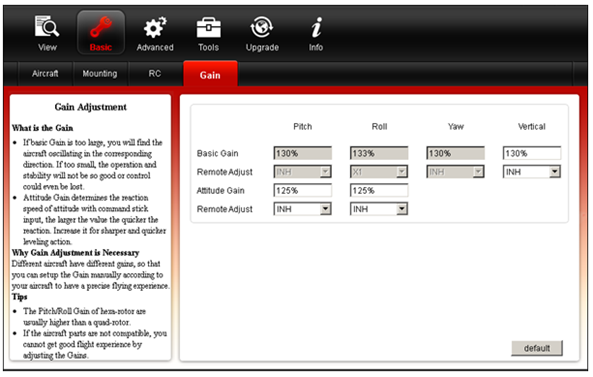
Basic-Gain Menüsü
Temel gain ayarlarının yapıldığı, gyroların kullanımının düzenlendiği bölümdür (Şekil 8.e). Gain ayarları her quadcopterde aynı olmaz. Bu ayarları etkileyen birkaç parametre vardır. Bunlar Motorun KV değeri, pilin voltaj değeri, pervane uzunluğu ve hatvesi, multikopterin ağırlığı ve motorların merkeze olan uzaklığıdır. Uçarken quadcopter titreme yapıyorsa gainler azaltılmalıdır. En iyi gain ayarı için quadcopteri manuel modda iken açısını koruyarak uçabiliyorsa gain ayarları iyi demektir. Açısını korumuyorsa bu ayarları değiştirmek gerekir. Pitch gain ayarı için quadcopter ileri geri hareketi yapılmalıdır ve bu hareketler yapılırken titreşim gözlemleniyorsa bu ayar azaltılmalıdır. Roll gain ayarı ise aynı mantık ile sağ sol hareketi yapılarak titreşime bakılmalıdır. Yaw gaini için quadcopterin kendi ekseninde dönerken titreşim tepkisine bakılmalıdır. Vertical gain ise yükseklik tutmasında etkili olacaktır.
Attitude Gain
Accelerometre sensörünün görevi bu parametreler ile belirlenir. Bu sensör quadcopteri belli bir açıya getirdikten sonra stiği bıraktığınızda yere doğru paralel konuma gelmesini sağlar. Buradaki parametre değeri ne kadar çok olursa quadcopterin yere doğru paralel olma hızı yani rüzgara olan direnci o kadar yüksek olacaktır.
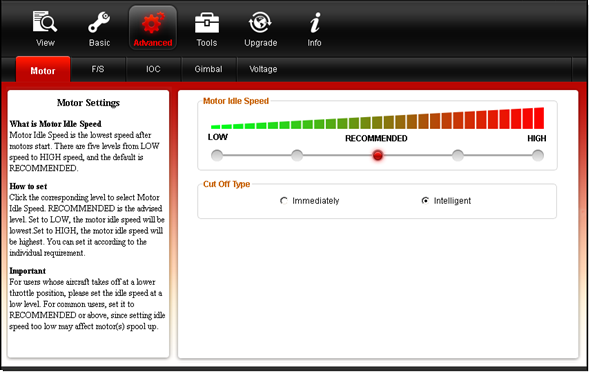
Advanced-Motor Menüsü
Motor idle speed: Quadcopteri başlatmak için stickler uygun pozisyona getirildiğinde motorların kalkış hızı bu menüden ayarlanır. Genellikle recommanded seçeneği kullanılır. Recommanded seçeneğinde normal hızda başlatılmış olunur. Projede bu ayar kullanılmıştır.
Cut Of Type
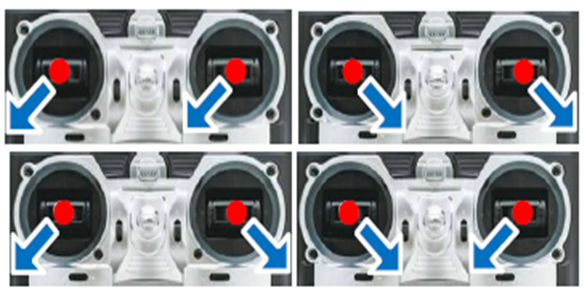
Motorların nasıl durdurulması gerektiğini ayarlandığı menüdür. Quadcopteri tamamen durdurmak iki seçenek mevcuttur.Bunlar; Immediately: Gazı sıfıra indirdiğimizde motorlar anında durur ve çalışmaz. Bu seçenek güvenlik açısından sakıncalıdır. Çünkü havada uçuş sırasında hızla giderken yavaşlamak için gazı azalttığınızda motorlar bir anda durabilir ve olası kaza sonuçlarına neden olur. Bunu önlemek adına diğer seçenek projede işaretlenmiştir. Intelligent: Bu seçenek gazı sıfıra getirdiğimizde motorları yerde tutacak şekilde döndürür ve tam olarak kapatmaz. Motorları kapatmak için kumandayı arm etmemiz gerekmektedir. Yani Şekil 8.g) deki hareketlerden birinin yapılması gerekmektedir.
Advanced-Fail/Safe Menüsü
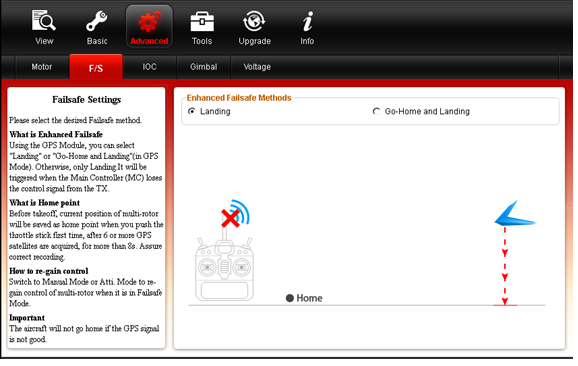
Bu menü quadcopterde GPS var ise kumanda alıcısının sinyali her hangi bir nedenden dolayı kesildiğinde, quadcopterin ne yapması gerektiği ayarlanan bölümüdür. İki seçenek vardır. Bunlar; Go Home And Landing: Bu seçenek kumanda alıcısının sinyali kesildiğinde, quadcopter başlangıçta nereden kalktıysa oraya otomatik olarak gider. Bu seçenek pek önerilmez nedeni ise her hangi bir GPS arazasında quadcopterin başlangıç konumunu yanlış hesaplaması sonucu quadcopter çok farklı yerlere gitmesidir. Landing: Bu seçenek ise kumanda alıcısının sinyali kesildiğinde quadcopteri bulunduğu konumdan yere yavaşca indirir. Projede bu seçenek işaretlenmiştir (Şekil 8.h).
Advanced-IOC menüsü
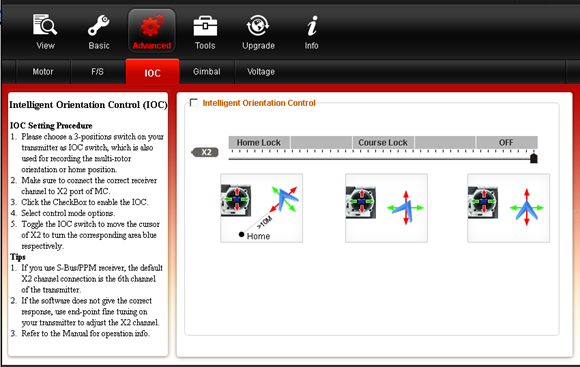
Bu menüde üç seçenek vardır. Bunlar; Home Lock: Bu seçenek kumandayı merkez kabul eder ve Quadcopter hangi yöne dönerse kumanda da geri switchine basıldığında, her zaman kumandaya dik olacak şekilde geri gelir ve bunu otomatik olarak ayarlar. Tam tersi işlem ileri switchi içinde geçerlidir. Course Lock: Koordinat sistemini Naza’nın kendi kordinant sistemine göre ayarlar ve bu seçenek önerilmez. OFF: Klasik uçurma modudur. Quadcopterin yönünü tamamen pilot belirler. Projede bu seçenek kullanılmıştır (Şekil 8.i).
Advanced-Gimbal menüsü
Bu menü hareketli kamera takılacaksa aktif edilir. Projede gimbal kullanılmamıştır.
Advanced-Voltage menüsü
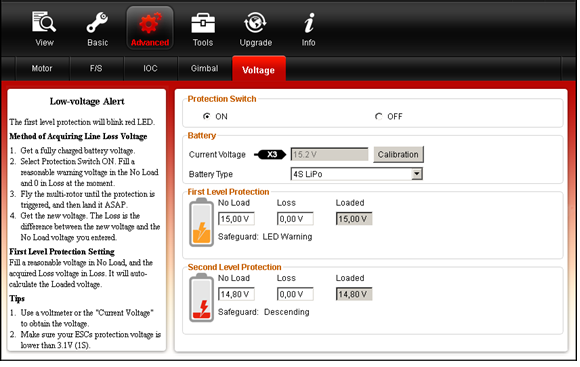
Bu menüden pil ile ilgili tüm bilgiler girilir, güvenlik önlemleri alınır. Detayları şu şekildedir; Protection switch: Güvenlik koruması açılması isteniyorsa On seçeneği kullanılır. Battery: Bu menüden pilin anlık voltaj değeri voltmetre ile ölçülüp Current Voltage seçeneğine yazılır. Bunu otomatik olarak da yapmak için Naza Kalibrasyon butonuna basıp ölçüm alınabilir. Fakat kişinin kendisinin ölçmesi daha sağlıklı sonuçlar verecektir. Aynı menüden Battery Type seçeneğinden pilin S, 2S, 3S, 4S. seçimi yapılır. First Level Protection: Bu menüden pilin voltaj değerleri hangi değerlere düşünce, Naza kontrol kartı gücü yavaş yavaş kesmesi gerektiği seçeneğidir. Second Level Protection: Bu menüde ise pil hangi değere düşünce Naza kontrol kartı gazı tamamen kapatması için gerekli ayar yapılır. Projede kullanılan değerler Şekil 8.j’de verilmiştir.
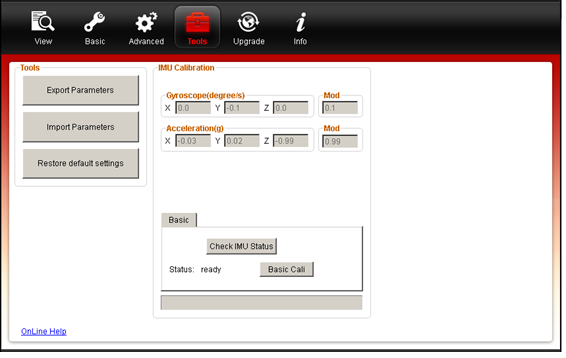
Tools Menüsü
Bu menüde quadcopterin gyrosu kalibre edilir. Arayüzün en önemli bölümlerinden biridir. Bu ayarlar quadcopterin uçuş sırasında kendini dengelemesi için yapılır. Örneğin quadcopterin ağırlık merkez ön tarafa yakın ise öndeki motorlar daha fazla devir dönerek dengeyi sağlamaya çalışır. Tools menüsünde üç tane butona basarak ayar yapılır. Bunlar Export Parameters, Import Parameters ve Restore Default Settings’dir. Export ve İmport Parametre ayarlarına basıp quadcopteri sağa, sola, ileri, geri hareket ettirmeliyiz. Bunu yaparken programda görülen Gyroscope ve Acceleration değerleri durmadan değişecektir. Bu işlemler bir kaç defa yapıldıktan sonra Basic seçeneğinden Basic Cali (kalibrasyon) butonuna tıklayıp Naza’ya bu ayarlar yüklenmelidir.
GÖRSEL OLARAK ARAYÜZ AYARLARI
a)
b)
c)
d)
e)
f)
g)
h)
i)
j)
k)
Şekil 8. Naza kontrol kartının arayüz üzerinden ayarlarının yapılması.
Drone Üzerinde Deneysel Çalışmalar
Bir DRONE nasıl yapılır? kısmını hallettik. Şimdi yaptığımız drone üzerinde deneysel çalışmalara bakalım.
Quadcopterlerde uçuş sırasında titreşimi önlemek çok önemlidir. Oluşan titreşim quadcopterin uçuşunu olumsuz etkiler, aktarılan görüntüde parazit ve görüntü kaymasına neden olur. Yapılan projede ilk uçuş esnasında titreşimin yoğun olarak görüldüğü gözlemlendi ve bu titreşimi önlemenin yolları araştırıldı.
Yazılımsal Olarak Titreşimi Önleme
Naza arayüzünde verilen “Gain Setting” ayarlarındaki pitch, roll, yaw ve vertical ayarları başlangıçta %145 değerindeydi. Bu ayarlar üzerinde uçuş denemeleri ve gözlem yaparak optimum değerler bulunmaya çalışıldı. Pitch ayarını yapmak için quadcopteri ileri ve geri hareket ettirildi. Pitch değeri %145 değerinden %130 değerine düşürülerek ileri geri hareket sırasında titreşimler azaltıldı. Roll gain ayarı için quadcopter sağa ve sola hareket %145 değerinden %133 değerine düşürüldü ve titreşimin azaldığı gözlemlendi.
Yaw hareketinde titreşimi azaltmak için quadcopter kendi ekseni etrafında döndürüldü ve bu dönmelerde titreşimi engellemek için %145 değerinden %130 değerine gain ayarı değiştirilerek titreşimin azaldığı gözlemlendi. Vertical gain ayarında quadcopter gazı sonuna kadar açıp kapayarak quadcopterin hareketi gözlemlendi. Son gazda quadcopter çok hızlı kalkmasına rağmen fazla titreşim yaptığı gözlemlendi. Bu değeri de %145 den %130 değerine düşürerek titreşim azaltıldı. Bu ayarlar daha düşük seviyeye çekildiğinde titreşimler daha çok azalsa da bu sefer de uçuş sırasında düzensizlikler yaşanmaya başladı. Yani quadcopter rüzgar vurdukça kendini toparlaması düzensizleşti. Uzun gözlemler sonucu bu değerler üzerinde karar verilmiştir.
Donanımsal Olarak Titreşimi Önleme
-
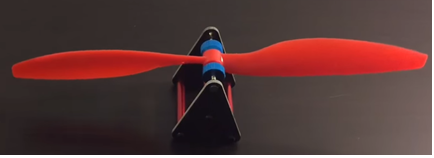
Pervane Balans Ayarları
Quadcopterlerde pervanelerin ağırlık merkezi tam orta noktada olmalı aksi takdirde pervaneler dönerken ağırlık merkezi pervanenin hangi yönündeyse o yöne dönerken quadcopterin kollarına kuvvet uygular ve titreşime neden olur. Bunu önlemek için aşağıdaki görülen resimdeki gibi Pervane balans aleti (manyetik, sürtünmesiz) kullanıldı. Pervanelerin balans ayarları ölçülerek, bu ayarların olmadığı anlaşıldı. Pervaneler mavi iki şeklin tam ortasına gelecek şekilde takılıp, dengede bırakıldığında hangi yöne doğru eğilirse ağırlık merkezi o yönde olduğunu göstermektedir (Şekil 9.a). Ağırlık merkezini ortaya getirmenin iki yolu vardır. Bunlardan birincisi ağırlık merkezine zıt olan kanata bant vb. gibi yapışkan malzemeler yapıştırarak ağırlık merkezini dengelemek, ikincisi ise ağırlık merkezinin olduğu kanata zımpara yardımıyla tıraşlayarak ağırlık merkezini ortaya almaktır. Projede zımpara yardımıyla ağırlık merkezi ortaya gelene kadar pervaneler zımparalandı ve Balans ayarları yapıldı. Bu işlem titreşimin büyük bir kısmını azaltarak quadcopterin daha az titreşimli uçmasına olanak sağladı.
-
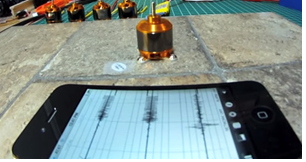
Motor Balans Ayarları:
Quadcopterde pervanelerin balans ayarları olduğu gibi motorlarında balans ayarları yapılması gerekmektedir. Bunun için bir adet android telefon kullanılabilir. App store veya google play’den “iSeismometer” adlı uygulama indirilip gerekli ayarlamaların yapılması yeterli olacaktır. Program telefonda çalıştırıldığında etraftaki titreşimleri (x,y,z koordinatlarında) algılar ve grafiğini çizer. Buradan titreşim olup olmadı yada hangi seviyede olduğu anlaşılabilir. Bu amaçla aşağıdaki adımlar takip edilebilir.
- Pervaneler motorlardan çıkarılmalı ve motorlar tek tek teste tabi tutulmalıdır. Motorlar ile telefon her hangi bir düz aynı zemine bırakılmalıdır. Motor çalıştırıldığında zemin üzerinde titreşim oluşturacaktır. Telefonda aynı zemin üzerinde olduğu için titreşimleri ölçecek ve bunu ekrana yansıtacaktır. Eğer titreşimlerin genliği büyük ise motorun balans ayarı olmadığı anlaşılır ve ağırlık merkezi motorun orta noktasından başka bir yöne kaymış demektir (Şekil 9.a).
- Motorlar üzerindeki titreşimleri azaltmak için pervanelerde yapılan işlemlerin benzerini motorlar içinde uygulayıp ağırlık merkezi olabildiğince ortaya getirilmelidir. Ağırlık merkezinin nerede olduğunu gözle anlamak zordur ve bunun için motorun dış kısmına yapıştırılacak bantları deneme yanılma yöntemiyle belirlenir. Bandı yapıştırdıktan sonra titreşim büyüyorsa motorun ağırlık merkezinin kaydığı yöne yakıştırmışız demektir. Titreşim küçülüyorsa ağırlık merkezi ortaya yaklaşmış demektir. Programdaki titreşimler ne kadar küçülür ve düzenli hale gelirse motorun quadcoptere yapacağı titreşim o kadar azalır (Şekil 9.c). Bu şekilde balans ayarını tüm motorlara yapılarak titreşimin düştüğü gözlemlenmiştir.
 a) | |
 b) | 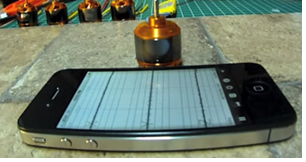 c) |
Şekil 9. a) Pervane balans cihazı. b) Balansı bozuk motorun ekranda oluşturduğu titreşim grafiği. c) Balansı iyileştirilmiş motorun ekranda oluşturduğu titreşim grafiği.
3.Kamera İçin Ayarlar
Quadcopter üzerinde yazılımsal ve donanımsal olarak yapılan ayarlardan sonra oldukça stabil uçmaya başladığı ve gözle görülen her hangi bir titreşim kalmadığı gözlemlenmiştir. Fakat görüntüyü aktaran Lakin yaptığımız işlemlerden sonra görüntüyü aktaran kameramız hala küçük titremelerden etkilendiğini ve küçük titreşimlerin bile görüntüyü olumsuz etkilediğini anladık.Bu titreşimleri engelleyemeyiz nedeni ise motorların ve pervanelerin Balans ayarlarını ne kadar yapsak da her zaman belli bir titreşimin olmasıdır. Ancak kameranın quadcoptere monte edilen yerlerde(vidalar,somunlar) titreşimi önleyecek lastik veya süngerimsi malzemeler kullanılırsa bu titreşimleri sönümlemesini sağlayabiliriz. Projede çift taraflı bant ve lastik kullanarak bu titreşimleri minimum seviyeye kadar düşürerek daha net bir görüntü sağladığı gözlemlenmiştir.
Bu yazıda Bir DRONE nasıl yapılır? elimden geldiğince size aktarmaya çalıştım. Bir sonraki yazım GPRS ile internet üzerinden drone kontrolü olacaktır.Diğer proje çalışmalarımıza buradan ulaşabilirsiniz.
Tek kelime ile mükemmel bir içerik olmuş.
Böyle bir içerik ile malzemelere sahip olan herkesin bunu başarabileceğine inanıyorum.
Eline sağlık.
Kendi drone’nunu yapmak isteyenler için güzel bir yazı oldu. İlerleyen zamanlarda GPRS üzerinden otonom drone projemi paylaşacağım.
Sabırsızlıkla bekliyorum 😀
Ellerine sağlık, çok detaylı, açıklayıcı ve efektif olmuş
Teşekkürler.
Sıfırdan bir drone yapmak isteyen herkesin elinin altında bulunması gereken bir yazı. Eline koluna sağlık. Bu tarz proje yazılarının devamını bekliyorum 🙂
Fırsat buldukca eski ve yeni projeleride paylaşacağım.
Super bır paylaşım olmus emeğine sağlık. Bu drone nin maliyeti nedir
Teşekkür ederim. Maliyeti 2016 da 3000TL civarında olmuştu. Tabi doların yükselmesi vb. etkilerle şuan çok daha fazla maliyet çıkar. Ben dronumu bir çok farklı projede kullanacağımı bildiğim için yüksek özellikli malzemeler aldım. Normalde 1000TL’yede drone yapabilirsiniz. Akşam doğru malzemeleri satın aldığım siteleri yazıma eklerim. Bu siteler yabancı ve güvenilir siteler. Bu malzemeler Türkiye’de malisef çok daha fazla fiyatlara satılıyor…
Drone ozelliklerini paylasir misiniz rica etsem?
2017 de 9000mah LiPo pil kullanmıştım ve 45 dakika uçuş süresi vardı. Teorikte 2 km menzili var ama hiç o kadar uzak mesafeye götürmeyi denemedim. GoPro gibi kaydetme özelliği olan kamera takmadım anlık görüntü alabileceğim mini kamera kullandım. Bu yüzden kaydetme özelliğii yok. Dronun kendi ağırlığına ek 5 kg yük taşıtmıştım.
Sayenizde okul projemi bu kaynaktan yapiyorum. İlerleyen zamanlarda soru sorabilir miyim?
Faydalı olduysa ne mutlu bize. Tabi ki sorularınızı buradan sorabilirsiniz
Merhaba. Parçaları nerden temin edebiliriz?
Paylaştığım siteler yurt dışı bazlı olup, güvenilir sitelerdir.
1)https://www.banggood.com
2)https://hobbyking.com
bu iki siteden her malzemeyi uygun fiyatlara temin edebilirsiniz.Ben tüm parçalarımı bu iki siteden temin ettim ve hala bu siteleri kullanmaktayım.